Autonomous Sumo Bots – RoboGames 2024
Autonomous Sumo Bots – RoboGames 2024
Program: CCSF Engineering Club
Role: Team Leader and Mechanical Lead
Overview:
I led a student team from City College of San Francisco to compete at RoboGames 2024, an international robotics competition held at the San Jose Convention Center. We built and entered three autonomous sumo robots: one for the Micro Sumo (100g) class, one for the Mini Sumo (500g) class, and a custom prototype in an intermediate weight category. These robots were designed to locate, track, and push opponents out of a circular arena using fully autonomous sensor-based control.
Project Scope and Constraints:
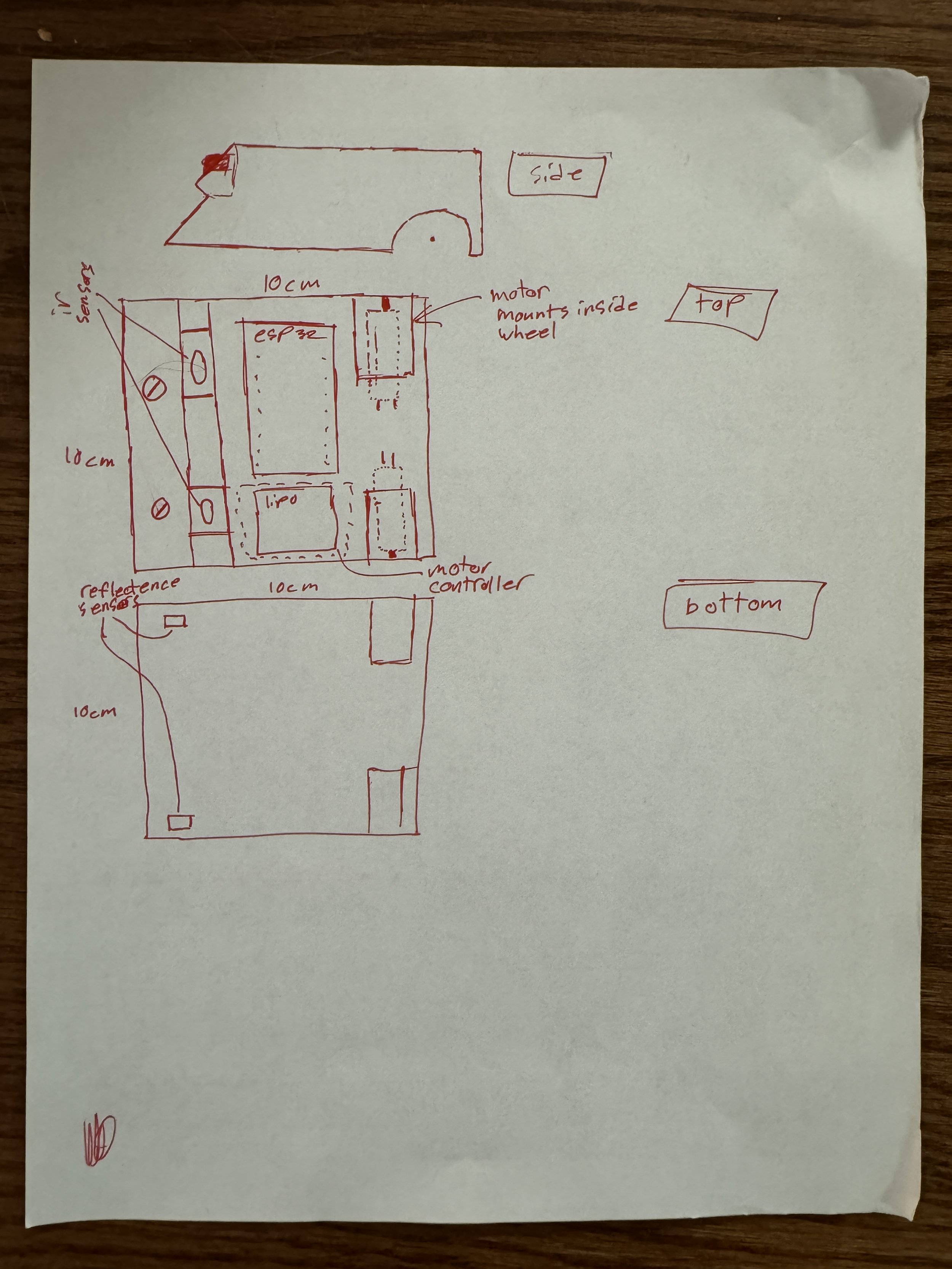
Each class had specific design requirements. The 100g Micro Sumo robot had to fit within a 5 cm x 5 cm footprint and weigh under 100 grams. The Mini Sumo robot had a 10 cm x 10 cm footprint and a 500 gram weight limit. All robots were required to function autonomously and remain within the arena. The competition featured international teams from countries including Japan, Brazil, India, and Germany.
I was responsible for all mechanical design and part sourcing, including compact chassis layouts, 3D-printed wheel hubs, and silicone tires cast using custom molds. For the 100g robot, I rewired a micro servo motor and built a standalone 555 timer circuit to meet the autonomous start rule while saving weight and space. I also learned C++ over the course of the project and contributed to the ESP32 codebase, working on logic for sensor inputs, threshold tuning, and motion routines. The sensor suite included a 9-DoF IMU, LIDAR for proximity, and reflectance sensors for ring-edge detection. Kalman filtering helped stabilize the data for responsive control.
We built and tested the robots at both CCSF and Noisebridge, a community makerspace in San Francisco. When a critical motor connector went missing days before the event, I contacted a connection I met at Noisebridge who hand-delivered a replacement within 30 minutes. Problem-solving like this, combined with consistent late-night testing and tight collaboration, kept the project moving on schedule. In the final stretch before competition, we worked through the night for three days straight, troubleshooting, coding, and assembling with no breaks. It was intense but necessary to finish on time.
Challenges and Problem Solving:
The 100g robot required extreme miniaturization. I removed nonessential parts from a micro servo, rewired it for direct control, and used a 555 timer to trigger its startup. To get the grip right, I experimented with multiple batches of hand-poured rubber tires to dial in the right balance of traction and compliance. During software testing, I helped debug sensor inputs and refine logic to reduce false edge detections, improve tracking, and increase reaction time.
Competition Results:
- Gold Medal – 100g Micro Sumo Class
- Gold Medal – 250g Lightweight Prototype Class
- Silver Medal – 500g Mini Sumo Class
This project pushed me to learn quickly, problem-solve under pressure, and contribute across mechanical, electrical, and software domains. It gave me practical experience building and refining autonomous robots in a real-world competitive environment.







